VDWModels geeft les in de basis beginselen van het A-Heli en A-Multikopter (drone) vliegen.
Dit doen wij op basis van het KNVVL Brevet.
A-HELI en A-MULTIKOPTER Figuren
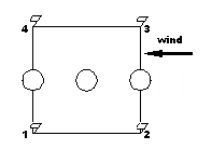
1. Zweefvlucht zijwaarts links / rechts
2. Zweefvlucht figuur M (Hovering M)
3. Horizontale 8 (geschoven)
4. Gevlogen stijgvlucht en vervolgens gevlogen daalvlucht met landing in de cirkel
5. Cirkel (geschoven om de piloot)
6. Algemene veiligheid vlucht (van begin tot einde)
7. Handling van het model
Nieuwe alinea
Bij de afmetingen van het heli-vierkant mag worden gekozen uit twee varianten: Óf
het helivierkant heeft de vaste afmeting van 10x10m met een landingscirkel van 1m
diameter, óf het vierkant wordt aangepast aan de rotordiameter van de heli waarmee
wordt gevlogen. De lengte van een zijde van het vierkant wordt in het laatste geval
vastgesteld op 10x de rotordiameter van de heli, de landingscirkel is dan 1x de
rotordiameter.
Deze keuze wordt gemaakt door de instructeur in samenspraak met de cursist, de
examinatoren dienen de keuze te respecteren.
De hover figuren worden gevlogen op een constante hoogte. De hoogte wordt
tijdens de instructie vastgesteld door de instructeur in samenspraak met de cursist.
In principe geldt een minimale hover hoogte van 0,5x de rotordiameter en een
maximale hover hoogte van 1,5x de rotordiameter. Voor aanvang van de
brevetvlucht worden de examinatoren van de te vliegen hover hoogte in kennis
gesteld.
Verder geldt dat:
Alle hover figuren worden gevlogen met de neus van het model in de wind (behalve
de cirkel om de piloot).
Alle hieronder beschreven figuren mogen ook gespiegeld worden gevlogen, dat wil
zeggen de zweefvlucht links-rechts mag ook als zweefvlucht rechts-links worden
uitgevoerd, de zweefvlucht figuur M mag ook rechtsom worden uitgevoerd etc...
De volgorde van de figuren is zodanig gekozen dat het op- en aftoeren beperkt blijft
tot 2 keer en er slechts éénmaal het model verplaatst hoeft te worden.

Na het opstijgen vanuit de landingscirkel tot hover hoogte wordt circa 2 seconden gepauzeerd.
Vervolgens wordt de zijdelingse zweefvlucht tot boven de linker vierkantzijde uitgevoerd.
Hier wordt circa 2 seconden gepauzeerd.
Vervolgens wordt de zweefvlucht tot boven de rechter vierkantzijde uitgevoerd.
Hier wordt wederom circa 2 seconden gepauzeerd.
Hierna volgt de zweefvlucht tot boven de landingscirkel.
Hier wordt weer circa 2 seconden gepauzeerd.
Vervolgens wordt het model in de landingscirkel neergezet.
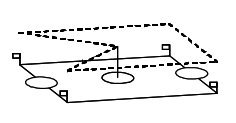
Na het opstijgen vanuit de landingscirkel tot hoverhoogte wordt circa 2 seconden gepauzeerd.
Vervolgens wordt de diagonale zweefvlucht tot boven het achterste linker hoekpunt uitgevoerd.
Hier wordt circa 2 seconden gepauzeerd.
Vervolgens wordt de voorwaartse zweefvlucht tot boven het voorste linker hoekpunt uitgevoerd.
Hier wordt circa 2 seconden gepauzeerd.
Vervolgens wordt de zijdelingse zweefvlucht tot boven het voorste rechter hoekpunt.
Hier wordt circa 2 seconden gepauzeerd.
Vervolgens wordt de achterwaartse zweefvlucht tot boven het achterste rechter hoekpunt.
Hier wordt circa 2 seconden gepauzeerd.
Vervolgens wordt de diagonale zweefvlucht tot boven de landingscirkel uitgevoerd.
Hier wordt circa 2 seconden gepauzeerd.
Vervolgens wordt het model in de landingscirkel neergezet.

Na het opstijgen vanuit de landingscirkel tot hoverhoogte wordt circa 2 seconden gepauzeerd
Vervolgens wordt zonder onderbrekingen horizontale geschoven acht uitgevoerd waarbij de neus in de vliegrichting blijft waarmee het figuur is begonnen.
Via het achterste linker hoekpunt wordt het vierkant verlaten om via het voorste linker hoekpunt in het vierkant terug te keren.
Via het beginpunt wordt de acht voortgezet waarna via het achterste rechter hoekpunt het vierkant weer wordt verlaten om via het voorste rechter hoekpunt het vierkant weer binnen te vliegen tot boven de landingscirkel. Hier wordt circa 2 seconden gepauzeerd.
Vervolgens wordt het model in de landingscirkel geland.
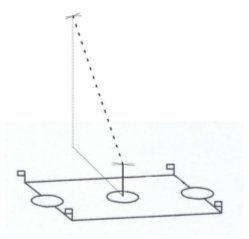
Na het opstijgen vanuit de landingscirkel tot hoverhoogte wordt circa 2 seconden gepauzeerd
Hierna volgt een stijgvlucht tot een virtueel punt op circa 10m hoogte en circa 10m links of rechts buiten het helivierkant.
Tijdens de stijgvlucht draait het model circa 45º in de richting van het virtuele punt.
Na het bereiken van het virtuele punt draait het model circa 45º om de verticale as in tegengestelde richting om weer met de neus in de wind te komen.
Hierna wordt de daalvlucht ingezet van het virtuele punt terug naar de landingscirkel.
Tijdens de daalvlucht draait het model circa 45º in de richting van de landingscirkel.
Zodra hoverhoogte is bereikt wordt 2 seconden gepauzeerd.
Vervolgens draait het model nogmaals circa 45º om de verticale as om weer in uitgangspositie te komen. Hierna wordt het model in de landingscirkel geland.
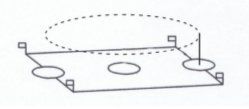
De kandidaat plaatst het model (cq. laat het plaatsen door de helper) in het midden op de overliggende zijde van het heli vierkant.
Hierna nemen kandidaat, helper en jury plaats in de landingscirkel.
Na het opstijgen tot hover hoogte wordt circa 2 seconden gepauzeerd.
Vervolgens wordt zonder onderbrekingen een horizontale geschoven cirkel om de piloot uitgevoerd waarbij de staart van het model naar de landingscirkel blijft wijzen.
Na het voltooien van de cirkel hangt het model weer boven de uitgangspositie.
Hier wordt circa 2 seconden gepauzeerd
Vervolgens wordt het model in het midden van de overliggende zijde van het heli vierkant geland.
Abonneer op onze nieuwsbrief
Neem contact met ons op

KvK: 57160163
BTW: NL002073405B94
SNS Bank: NL14 SNSB 0858 1511 46




Contactinformatie
+31(0)85-3019927
info@vdwmodels.nl
Velduil 27
1704XC Heerhugowaard
Nederland